
Arduino + HC-SR04
Description
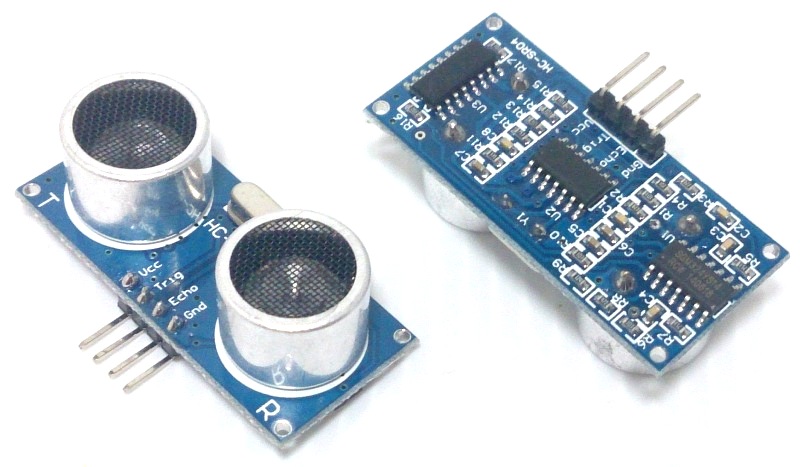
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package. From 2cm to 400 cm or 1” to 13 feet. Its operation is not affected by sunlight or black material. Acoustically soft materials like cloth can be difficult to detect. It is available as a complete package with both ultrasonic transmitter and receiver module.
Features
Power Supply :+5V DC
Quiescent Current : <2mA
Working Current: 15mA
Effectual Angle: <15°
Ranging Distance : 2cm – 400 cm/1″ – 13ft
Resolution : 0.3 cm
Measuring Angle: 30 degree
Trigger Input Pulse width: 10uS
Dimension: 45mm x 20mm x 15mm
Hardware Required
- Arduino Board
- HC-SR04 ultrasonic sensor module
- Hookup wire
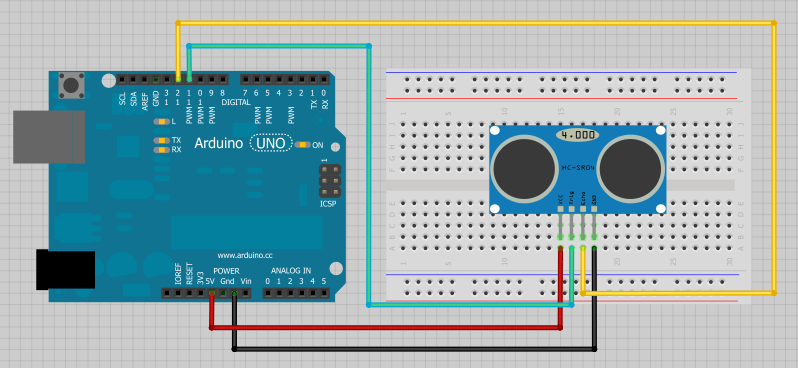
Circuit
Code
Example 1
/* * created by Rui Santos, http://randomnerdtutorials.com * * Complete Guide for Ultrasonic Sensor HC-SR04 * Ultrasonic sensor Pins: VCC: +5VDC Trig : Trigger (INPUT) - Pin11 Echo: Echo (OUTPUT) - Pin 12 GND: GND */ int trigPin = 11; //Trig - green Jumper int echoPin = 12; //Echo - yellow Jumper long duration, cm, inches; void setup() { //Serial Port begin Serial.begin (9600); //Define inputs and outputs pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); } void loop() { // The sensor is triggered by a HIGH pulse of 10 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: digitalWrite(trigPin, LOW); delayMicroseconds(5); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Read the signal from the sensor: a HIGH pulse whose // duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object. pinMode(echoPin, INPUT); duration = pulseIn(echoPin, HIGH); // convert the time into a distance cm = (duration/2) / 29.1; inches = (duration/2) / 74; Serial.print(inches); Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); delay(250); }
Example 2
In this example we use the “NewPing” library to drive the HC-SR04 ultrasonic sensor
#include <NewPing.h>
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(115200);
}
void loop() {
delay(50);
int uS = sonar.ping();
Serial.print("Ping: ");
Serial.print(uS / US_ROUNDTRIP_CM);
Serial.println("cm");
}
Example 3
In this example we demonstrate how to use multiple sensors.
// ---------------------------------------------------------
// This example code was used to successfully communicate
// with 15 ultrasonic sensors. You can adjust the number of
// sensors in your project by changing SONAR_NUM and the
// number of NewPing objects in the "sonar" array. You also
// need to change the pins for each sensor for the NewPing
// objects. Each sensor is pinged at 33ms intervals. So, one
// cycle of all sensors takes 495ms (33 * 15 = 495ms). The
// results are sent to the "oneSensorCycle" function which
// currently just displays the distance data. Your project
// would normally process the sensor results in this
// function (for example, decide if a robot needs to turn
// and call the turn function). Keep in mind this example is
// event-driven. Your complete sketch needs to be written so
// there's no "delay" commands and the loop() cycles at
// faster than a 33ms rate. If other processes take longer
// than 33ms, you'll need to increase PING_INTERVAL so it
// doesn't get behind.
// ---------------------------------------------------------
#include <NewPing.h>
#define SONAR_NUM 15 // Number or sensors.
#define MAX_DISTANCE 200 // Max distance in cm.
#define PING_INTERVAL 33 // Milliseconds between pings.
unsigned long pingTimer[SONAR_NUM]; // When each pings.
unsigned int cm[SONAR_NUM]; // Store ping distances.
uint8_t currentSensor = 0; // Which sensor is active.
NewPing sonar[SONAR_NUM] = { // Sensor object array.
NewPing(41, 42, MAX_DISTANCE),
NewPing(43, 44, MAX_DISTANCE),
NewPing(45, 20, MAX_DISTANCE),
NewPing(21, 22, MAX_DISTANCE),
NewPing(23, 24, MAX_DISTANCE),
NewPing(25, 26, MAX_DISTANCE),
NewPing(27, 28, MAX_DISTANCE),
NewPing(29, 30, MAX_DISTANCE),
NewPing(31, 32, MAX_DISTANCE),
NewPing(34, 33, MAX_DISTANCE),
NewPing(35, 36, MAX_DISTANCE),
NewPing(37, 38, MAX_DISTANCE),
NewPing(39, 40, MAX_DISTANCE),
NewPing(50, 51, MAX_DISTANCE),
NewPing(52, 53, MAX_DISTANCE)
};
void setup() {
Serial.begin(115200);
pingTimer[0] = millis() + 75; // First ping start in ms.
for (uint8_t i = 1; i < SONAR_NUM; i++)
pingTimer[i] = pingTimer[i - 1] + PING_INTERVAL;
}
void loop() {
for (uint8_t i = 0; i < SONAR_NUM; i++) {
if (millis() >= pingTimer[i]) {
pingTimer[i] += PING_INTERVAL * SONAR_NUM;
if (i == 0 && currentSensor == SONAR_NUM - 1)
oneSensorCycle(); // Do something with results.
sonar[currentSensor].timer_stop();
currentSensor = i;
cm[currentSensor] = 0;
sonar[currentSensor].ping_timer(echoCheck);
}
}
// The rest of your code would go here.
}
void echoCheck() { // If ping echo, set distance to array.
if (sonar[currentSensor].check_timer())
cm[currentSensor] = sonar[currentSensor].ping_result / US_ROUNDTRIP_CM;
}
void oneSensorCycle() { // Do something with the results.
for (uint8_t i = 0; i < SONAR_NUM; i++) {
Serial.print(i);
Serial.print("=");
Serial.print(cm[i]);
Serial.print("cm ");
}
Serial.println();
}